


STM32-12 CANBus概念介紹 by IT邦幫忙
CAN总线的升级版——CAN FD简介
为什么需要CAN FD?
在汽车行业,为什么需要CAN FD?
1. 原因主要是因为汽车功能越来越多,越来越复杂,传统的CAN总线(CAN2.0)的负载率越来越高,甚至负载率高达95%。
2. 因为传统CAN总线的局限性:
· 传输率最大为1Mbiy/s(典型的<= 500kbit/s);
· 传统CAN数据帧超过50%的额外开销(overhead > 50%)。
3. 对比其他协议,额外开销比例要小得多,如UDP (1500 bytes/datagram, 64 bytes overhead),FlexRay(254 bytes/frame, 8 bytes overhead)。
4. 因为历史原因,汽车不可能直接放弃目前的传统CAN总线技术,一切推到重来。那么为了解决CAN总线负载率问题,而又能兼容CAN总线,并且研发成本不能太高的问题,2015年最新的修订版ISO 11898-1(classic CAN和CAN FD)发布。
什么是CAN FD?
CAN FD 是CAN with Flexible Data rate的缩写。也可以简单的认为是传统CAN的升级版。在上一篇文章汽车的中枢神经系统——CAN总线简介可以看到CAN整个发展历程。
2011年,开始CAN FD协议的开发。
2015年,ISO 11898-1(Classical CAN和CAN FD)修订版发布。
对比传统CAN总线技术,CAN FD有两方面的升级:
1. 支持可变速率—> 最大5Mbit/s;
2. 支持更长数据长度--> 最长64 bytes数据。

CAN FD的开发成本和传统CAN开发成本相差不大,并且可以和传统CAN很好兼容。
CAN FD对比FlexRay的优势在于:
1. CAN FD的开发成本远低于FlexRay;
2. FlexRay对ECU升级刷写不友好。
CAN FD对比以太网的优势在于:
1. CAN FD的开发成本远低于以太网;
2. 以太网优势在于大数据的传输但不能完全适用于当前汽车架构。
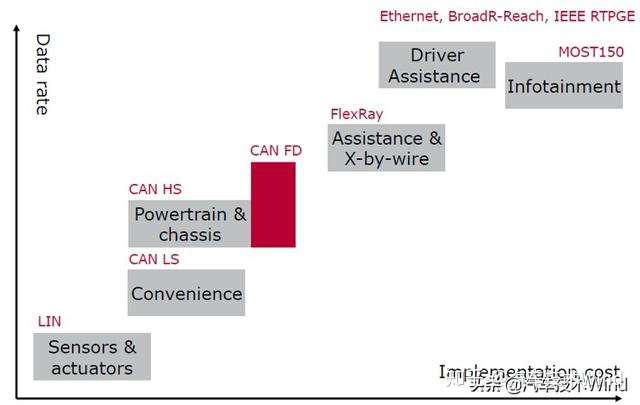
From Vector——Data Rate VS Cost
CAN FD 数据帧
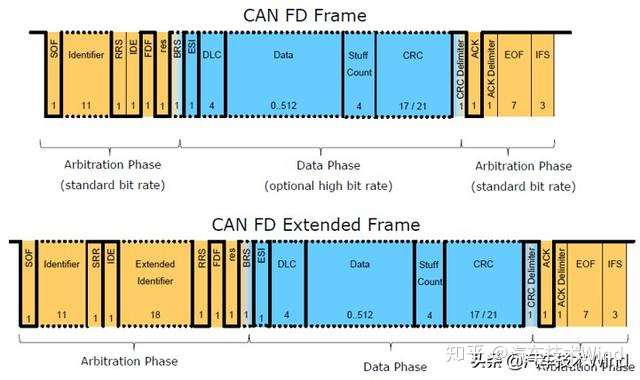
对比传统CAN的数据帧,CAN FD在控制场新添加EDL位、BRS位、ESI位,采用了新的DLC编码方式、新的CRC算法(CRC场扩展到21位)。
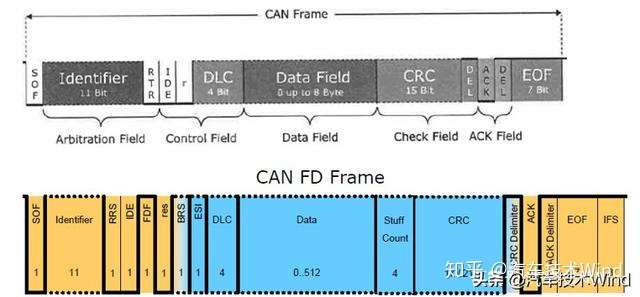
CAN FD数据帧 VS CAN数据帧
1. 起始位SOF(start of frame)
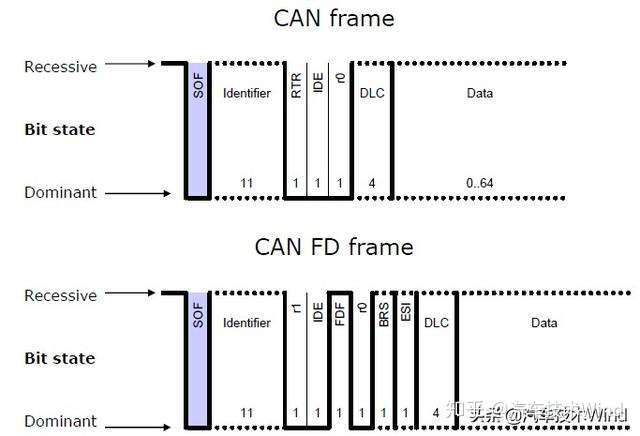
传统CAN的数据帧起始位SOF和CAN FD的数据帧起始位SOF是一样的,一个bit的显性位‘0’。
2. 仲裁场(Arbitration Field)
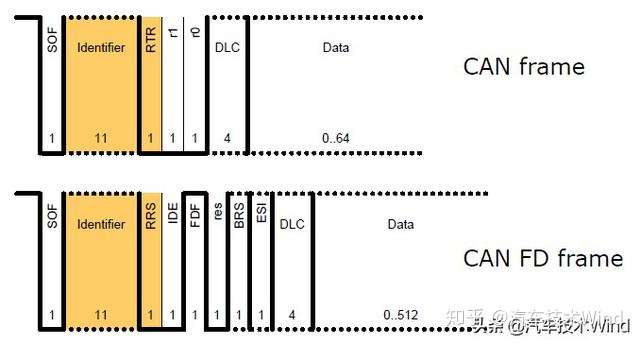
对比传统CAN数据帧,CAN FD共享相同的CAN ID,包括扩展数据帧的ID。
CAN FD用RRS bit(始终为显性位‘0’)代替RTR。
FDF(FD format)表示CAN FD还是传统CAN数据帧:
· FDF – ‘0’ --> 传统CAN数据帧
· FDF – ‘1’--> CAN FD数据帧
BRS(Bit Rate Switch)表示时钟频率的切换:
· BRS – ‘1’-->时钟频率切换
ESI(Error State Indicator)表示CAN总线的错误状态。
3. DLC控制域(control Field)
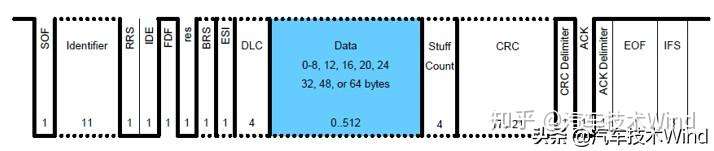
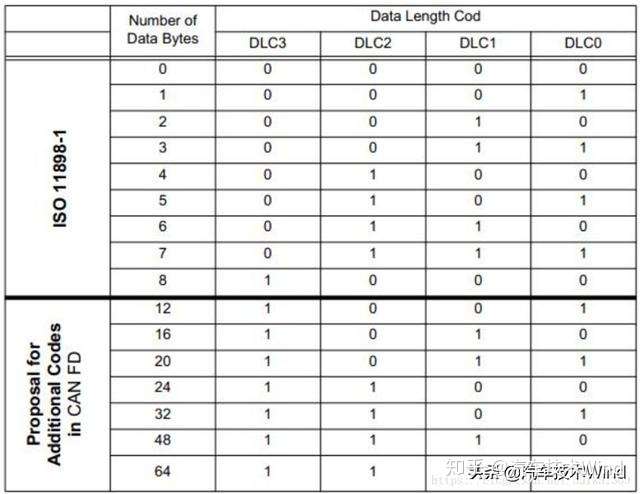
DLC用于表示数据帧的数据长度。并且支持传统CAN 数据帧的编码方式。
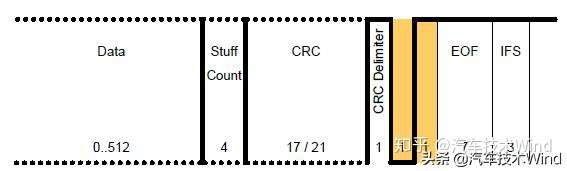
4. CRC
CAN总线由于位填充规则对CRC的干扰,造成错帧漏检率未达到设计意图。CAN FD对CRC算法做了改变,即CRC以含填充位的位流进行计算。在校验和部分为避免再有连续位超过6个,就确定在第一位以及以后每4位添加一个填充位加以分割,这个填充位的值是上一位的反码。作为格式检查,如果填充位不是上一位的反码,就作出错处理。CAN FD的CRC场扩展到了21位。
根据不同的数据长度,CRC的长度也不一样:
· CRC 15bits –> 传统CAN;
· CRC 17bits--> 数据长度<= 16bytes;
· CRC 21bits -->数据长度>16bytes。
CRC的结束标识位(CRC Delimiter)一般是1位,但也接收2位。
5. ACK
ACK紧跟着CRC结束标识位。不同的是,CAN FD支持2bits的ACK的识别。
6. 结束标识符(End of Frame)
EOL在传统CAN,CAN FD中都是7个连续隐性位“1”。
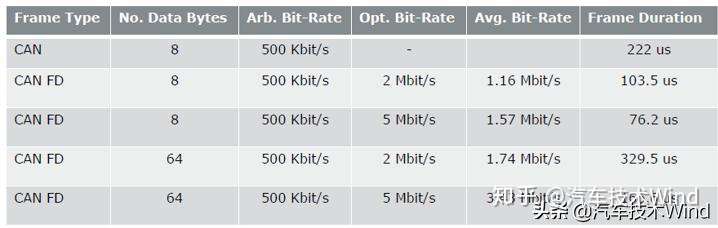
性能对比
>出處來源: 知乎
>來源網址:https://zhuanlan.zhihu.com/p/79389547
>如有侵權疑慮,請來信告知,立即下架,謝謝

專業文章
技術解析
-
了解 SocketCAN CAN 網路的 Linux 統一介面
-
卷積運算範例
-
CNN 池化操作範例
-
卷積神經網路(Convolutional Neural Network, CNN)簡介
-
J1939 新世代:基於 CAN FD 的 J1939
-
SAE J1939 深度解析:PGN 與 SPN 拆解
-
SUNCAN CAN FD 實作展示:實際效能評估 Linux
-
CAN FD 協議深入解析
-
為什麼 CAN FD 很重要:超越傳統的CAN
-
Hailo AI 處理器在個人電腦上的應用
-
訪問控制與身份管理
-
智慧交通系統
-
周圍環境防護
-
Hailo AI 處理器應用於AOI 自動光學檢測
-
針對ADAS和AD的Hailo人工智慧處理器
-
你知道CAN-FD協議有多少? by 程式人生
-
STM32-12 CANBus概念介紹 by IT邦幫忙
-
CAN/CAN FD 简介 by 大大通
-
CAN bus 通訊協定介紹 by 大大通
-
CAN总线的升级版-CAN FD简介 by 知乎
-
NXP LPC54018的CAN-FD by 大聯大控股
-
掌握非對稱延遲變數 CAN收發器提高資料傳輸率 by 新通訊 / Magnus-Maria Hell
-
什么是CAN-BUS? by 汽车之家 百科
-
邁向電動車的美好未來 by 電子工程專輯/ 孔敏,莫仕(Molex)中國區汽車事業部高級銷售總監
-
全新車載技術讓中低階車款實現高階音視訊體驗 by 電子工程專輯/STMicroelectronics
STM32-12 CANBus概念介紹 by IT邦幫忙
CAN总线的升级版——CAN FD简介
为什么需要CAN FD?
在汽车行业,为什么需要CAN FD?
1. 原因主要是因为汽车功能越来越多,越来越复杂,传统的CAN总线(CAN2.0)的负载率越来越高,甚至负载率高达95%。
2. 因为传统CAN总线的局限性:
· 传输率最大为1Mbiy/s(典型的<= 500kbit/s);
· 传统CAN数据帧超过50%的额外开销(overhead > 50%)。
3. 对比其他协议,额外开销比例要小得多,如UDP (1500 bytes/datagram, 64 bytes overhead),FlexRay(254 bytes/frame, 8 bytes overhead)。
4. 因为历史原因,汽车不可能直接放弃目前的传统CAN总线技术,一切推到重来。那么为了解决CAN总线负载率问题,而又能兼容CAN总线,并且研发成本不能太高的问题,2015年最新的修订版ISO 11898-1(classic CAN和CAN FD)发布。
什么是CAN FD?
CAN FD 是CAN with Flexible Data rate的缩写。也可以简单的认为是传统CAN的升级版。在上一篇文章汽车的中枢神经系统——CAN总线简介可以看到CAN整个发展历程。
2011年,开始CAN FD协议的开发。
2015年,ISO 11898-1(Classical CAN和CAN FD)修订版发布。
对比传统CAN总线技术,CAN FD有两方面的升级:
1. 支持可变速率—> 最大5Mbit/s;
2. 支持更长数据长度--> 最长64 bytes数据。
CAN FD的开发成本和传统CAN开发成本相差不大,并且可以和传统CAN很好兼容。
CAN FD对比FlexRay的优势在于:
1. CAN FD的开发成本远低于FlexRay;
2. FlexRay对ECU升级刷写不友好。
CAN FD对比以太网的优势在于:
1. CAN FD的开发成本远低于以太网;
2. 以太网优势在于大数据的传输但不能完全适用于当前汽车架构。
From Vector——Data Rate VS Cost
CAN FD 数据帧
对比传统CAN的数据帧,CAN FD在控制场新添加EDL位、BRS位、ESI位,采用了新的DLC编码方式、新的CRC算法(CRC场扩展到21位)。
CAN FD数据帧 VS CAN数据帧
1. 起始位SOF(start of frame)
传统CAN的数据帧起始位SOF和CAN FD的数据帧起始位SOF是一样的,一个bit的显性位‘0’。
2. 仲裁场(Arbitration Field)
对比传统CAN数据帧,CAN FD共享相同的CAN ID,包括扩展数据帧的ID。
CAN FD用RRS bit(始终为显性位‘0’)代替RTR。
FDF(FD format)表示CAN FD还是传统CAN数据帧:
· FDF – ‘0’ --> 传统CAN数据帧
· FDF – ‘1’--> CAN FD数据帧
BRS(Bit Rate Switch)表示时钟频率的切换:
· BRS – ‘1’-->时钟频率切换
ESI(Error State Indicator)表示CAN总线的错误状态。
3. DLC控制域(control Field)
DLC用于表示数据帧的数据长度。并且支持传统CAN 数据帧的编码方式。
4. CRC
CAN总线由于位填充规则对CRC的干扰,造成错帧漏检率未达到设计意图。CAN FD对CRC算法做了改变,即CRC以含填充位的位流进行计算。在校验和部分为避免再有连续位超过6个,就确定在第一位以及以后每4位添加一个填充位加以分割,这个填充位的值是上一位的反码。作为格式检查,如果填充位不是上一位的反码,就作出错处理。CAN FD的CRC场扩展到了21位。
根据不同的数据长度,CRC的长度也不一样:
· CRC 15bits –> 传统CAN;
· CRC 17bits--> 数据长度<= 16bytes;
· CRC 21bits -->数据长度>16bytes。
CRC的结束标识位(CRC Delimiter)一般是1位,但也接收2位。
5. ACK
ACK紧跟着CRC结束标识位。不同的是,CAN FD支持2bits的ACK的识别。
6. 结束标识符(End of Frame)
EOL在传统CAN,CAN FD中都是7个连续隐性位“1”。
性能对比
>出處來源: 知乎
>來源網址:https://zhuanlan.zhihu.com/p/79389547
>如有侵權疑慮,請來信告知,立即下架,謝謝
專業文章
技術解析
-
了解 SocketCAN CAN 網路的 Linux 統一介面
-
卷積運算範例
-
CNN 池化操作範例
-
卷積神經網路(Convolutional Neural Network, CNN)簡介
-
J1939 新世代:基於 CAN FD 的 J1939
-
SAE J1939 深度解析:PGN 與 SPN 拆解
-
SUNCAN CAN FD 實作展示:實際效能評估 Linux
-
CAN FD 協議深入解析
-
為什麼 CAN FD 很重要:超越傳統的CAN
-
Hailo AI 處理器在個人電腦上的應用
-
訪問控制與身份管理
-
智慧交通系統
-
周圍環境防護
-
Hailo AI 處理器應用於AOI 自動光學檢測
-
針對ADAS和AD的Hailo人工智慧處理器
-
你知道CAN-FD協議有多少? by 程式人生
-
STM32-12 CANBus概念介紹 by IT邦幫忙
-
CAN/CAN FD 简介 by 大大通
-
CAN bus 通訊協定介紹 by 大大通
-
CAN总线的升级版-CAN FD简介 by 知乎
-
NXP LPC54018的CAN-FD by 大聯大控股
-
掌握非對稱延遲變數 CAN收發器提高資料傳輸率 by 新通訊 / Magnus-Maria Hell
-
什么是CAN-BUS? by 汽车之家 百科
-
邁向電動車的美好未來 by 電子工程專輯/ 孔敏,莫仕(Molex)中國區汽車事業部高級銷售總監
-
全新車載技術讓中低階車款實現高階音視訊體驗 by 電子工程專輯/STMicroelectronics
STM32-12 CANBus概念介紹 by IT邦幫忙
CAN总线的升级版——CAN FD简介
为什么需要CAN FD?
在汽车行业,为什么需要CAN FD?
1. 原因主要是因为汽车功能越来越多,越来越复杂,传统的CAN总线(CAN2.0)的负载率越来越高,甚至负载率高达95%。
2. 因为传统CAN总线的局限性:
· 传输率最大为1Mbiy/s(典型的<= 500kbit/s);
· 传统CAN数据帧超过50%的额外开销(overhead > 50%)。
3. 对比其他协议,额外开销比例要小得多,如UDP (1500 bytes/datagram, 64 bytes overhead),FlexRay(254 bytes/frame, 8 bytes overhead)。
4. 因为历史原因,汽车不可能直接放弃目前的传统CAN总线技术,一切推到重来。那么为了解决CAN总线负载率问题,而又能兼容CAN总线,并且研发成本不能太高的问题,2015年最新的修订版ISO 11898-1(classic CAN和CAN FD)发布。
什么是CAN FD?
CAN FD 是CAN with Flexible Data rate的缩写。也可以简单的认为是传统CAN的升级版。在上一篇文章汽车的中枢神经系统——CAN总线简介可以看到CAN整个发展历程。
2011年,开始CAN FD协议的开发。
2015年,ISO 11898-1(Classical CAN和CAN FD)修订版发布。
对比传统CAN总线技术,CAN FD有两方面的升级:
1. 支持可变速率—> 最大5Mbit/s;
2. 支持更长数据长度--> 最长64 bytes数据。
CAN FD的开发成本和传统CAN开发成本相差不大,并且可以和传统CAN很好兼容。
CAN FD对比FlexRay的优势在于:
1. CAN FD的开发成本远低于FlexRay;
2. FlexRay对ECU升级刷写不友好。
CAN FD对比以太网的优势在于:
1. CAN FD的开发成本远低于以太网;
2. 以太网优势在于大数据的传输但不能完全适用于当前汽车架构。
From Vector——Data Rate VS Cost
CAN FD 数据帧
对比传统CAN的数据帧,CAN FD在控制场新添加EDL位、BRS位、ESI位,采用了新的DLC编码方式、新的CRC算法(CRC场扩展到21位)。
CAN FD数据帧 VS CAN数据帧
1. 起始位SOF(start of frame)
传统CAN的数据帧起始位SOF和CAN FD的数据帧起始位SOF是一样的,一个bit的显性位‘0’。
2. 仲裁场(Arbitration Field)
对比传统CAN数据帧,CAN FD共享相同的CAN ID,包括扩展数据帧的ID。
CAN FD用RRS bit(始终为显性位‘0’)代替RTR。
FDF(FD format)表示CAN FD还是传统CAN数据帧:
· FDF – ‘0’ --> 传统CAN数据帧
· FDF – ‘1’--> CAN FD数据帧
BRS(Bit Rate Switch)表示时钟频率的切换:
· BRS – ‘1’-->时钟频率切换
ESI(Error State Indicator)表示CAN总线的错误状态。
3. DLC控制域(control Field)
DLC用于表示数据帧的数据长度。并且支持传统CAN 数据帧的编码方式。
4. CRC
CAN总线由于位填充规则对CRC的干扰,造成错帧漏检率未达到设计意图。CAN FD对CRC算法做了改变,即CRC以含填充位的位流进行计算。在校验和部分为避免再有连续位超过6个,就确定在第一位以及以后每4位添加一个填充位加以分割,这个填充位的值是上一位的反码。作为格式检查,如果填充位不是上一位的反码,就作出错处理。CAN FD的CRC场扩展到了21位。
根据不同的数据长度,CRC的长度也不一样:
· CRC 15bits –> 传统CAN;
· CRC 17bits--> 数据长度<= 16bytes;
· CRC 21bits -->数据长度>16bytes。
CRC的结束标识位(CRC Delimiter)一般是1位,但也接收2位。
5. ACK
ACK紧跟着CRC结束标识位。不同的是,CAN FD支持2bits的ACK的识别。
6. 结束标识符(End of Frame)
EOL在传统CAN,CAN FD中都是7个连续隐性位“1”。
性能对比
>出處來源: 知乎
>來源網址:https://zhuanlan.zhihu.com/p/79389547
>如有侵權疑慮,請來信告知,立即下架,謝謝
專業文章
技術解析
-
了解 SocketCAN CAN 網路的 Linux 統一介面
-
卷積運算範例
-
CNN 池化操作範例
-
卷積神經網路(Convolutional Neural Network, CNN)簡介
-
J1939 新世代:基於 CAN FD 的 J1939
-
SAE J1939 深度解析:PGN 與 SPN 拆解
-
SUNCAN CAN FD 實作展示:實際效能評估 Linux
-
CAN FD 協議深入解析
-
為什麼 CAN FD 很重要:超越傳統的CAN
-
Hailo AI 處理器在個人電腦上的應用
-
訪問控制與身份管理
-
智慧交通系統
-
周圍環境防護
-
Hailo AI 處理器應用於AOI 自動光學檢測
-
針對ADAS和AD的Hailo人工智慧處理器
-
你知道CAN-FD協議有多少? by 程式人生
-
STM32-12 CANBus概念介紹 by IT邦幫忙
-
CAN/CAN FD 简介 by 大大通
-
CAN bus 通訊協定介紹 by 大大通
-
CAN总线的升级版-CAN FD简介 by 知乎
-
NXP LPC54018的CAN-FD by 大聯大控股
-
掌握非對稱延遲變數 CAN收發器提高資料傳輸率 by 新通訊 / Magnus-Maria Hell
-
什么是CAN-BUS? by 汽车之家 百科
-
邁向電動車的美好未來 by 電子工程專輯/ 孔敏,莫仕(Molex)中國區汽車事業部高級銷售總監
-
全新車載技術讓中低階車款實現高階音視訊體驗 by 電子工程專輯/STMicroelectronics
STM32-12 CANBus概念介紹 by IT邦幫忙
CAN总线的升级版——CAN FD简介
为什么需要CAN FD?
在汽车行业,为什么需要CAN FD?
1. 原因主要是因为汽车功能越来越多,越来越复杂,传统的CAN总线(CAN2.0)的负载率越来越高,甚至负载率高达95%。
2. 因为传统CAN总线的局限性:
· 传输率最大为1Mbiy/s(典型的<= 500kbit/s);
· 传统CAN数据帧超过50%的额外开销(overhead > 50%)。
3. 对比其他协议,额外开销比例要小得多,如UDP (1500 bytes/datagram, 64 bytes overhead),FlexRay(254 bytes/frame, 8 bytes overhead)。
4. 因为历史原因,汽车不可能直接放弃目前的传统CAN总线技术,一切推到重来。那么为了解决CAN总线负载率问题,而又能兼容CAN总线,并且研发成本不能太高的问题,2015年最新的修订版ISO 11898-1(classic CAN和CAN FD)发布。
什么是CAN FD?
CAN FD 是CAN with Flexible Data rate的缩写。也可以简单的认为是传统CAN的升级版。在上一篇文章汽车的中枢神经系统——CAN总线简介可以看到CAN整个发展历程。
2011年,开始CAN FD协议的开发。
2015年,ISO 11898-1(Classical CAN和CAN FD)修订版发布。
对比传统CAN总线技术,CAN FD有两方面的升级:
1. 支持可变速率—> 最大5Mbit/s;
2. 支持更长数据长度--> 最长64 bytes数据。
CAN FD的开发成本和传统CAN开发成本相差不大,并且可以和传统CAN很好兼容。
CAN FD对比FlexRay的优势在于:
1. CAN FD的开发成本远低于FlexRay;
2. FlexRay对ECU升级刷写不友好。
CAN FD对比以太网的优势在于:
1. CAN FD的开发成本远低于以太网;
2. 以太网优势在于大数据的传输但不能完全适用于当前汽车架构。
From Vector——Data Rate VS Cost
CAN FD 数据帧
对比传统CAN的数据帧,CAN FD在控制场新添加EDL位、BRS位、ESI位,采用了新的DLC编码方式、新的CRC算法(CRC场扩展到21位)。
CAN FD数据帧 VS CAN数据帧
1. 起始位SOF(start of frame)
传统CAN的数据帧起始位SOF和CAN FD的数据帧起始位SOF是一样的,一个bit的显性位‘0’。
2. 仲裁场(Arbitration Field)
对比传统CAN数据帧,CAN FD共享相同的CAN ID,包括扩展数据帧的ID。
CAN FD用RRS bit(始终为显性位‘0’)代替RTR。
FDF(FD format)表示CAN FD还是传统CAN数据帧:
· FDF – ‘0’ --> 传统CAN数据帧
· FDF – ‘1’--> CAN FD数据帧
BRS(Bit Rate Switch)表示时钟频率的切换:
· BRS – ‘1’-->时钟频率切换
ESI(Error State Indicator)表示CAN总线的错误状态。
3. DLC控制域(control Field)
DLC用于表示数据帧的数据长度。并且支持传统CAN 数据帧的编码方式。
4. CRC
CAN总线由于位填充规则对CRC的干扰,造成错帧漏检率未达到设计意图。CAN FD对CRC算法做了改变,即CRC以含填充位的位流进行计算。在校验和部分为避免再有连续位超过6个,就确定在第一位以及以后每4位添加一个填充位加以分割,这个填充位的值是上一位的反码。作为格式检查,如果填充位不是上一位的反码,就作出错处理。CAN FD的CRC场扩展到了21位。
根据不同的数据长度,CRC的长度也不一样:
· CRC 15bits –> 传统CAN;
· CRC 17bits--> 数据长度<= 16bytes;
· CRC 21bits -->数据长度>16bytes。
CRC的结束标识位(CRC Delimiter)一般是1位,但也接收2位。
5. ACK
ACK紧跟着CRC结束标识位。不同的是,CAN FD支持2bits的ACK的识别。
6. 结束标识符(End of Frame)
EOL在传统CAN,CAN FD中都是7个连续隐性位“1”。
性能对比
>出處來源: 知乎
>來源網址:https://zhuanlan.zhihu.com/p/79389547
>如有侵權疑慮,請來信告知,立即下架,謝謝
專業文章
技術解析
-
了解 SocketCAN CAN 網路的 Linux 統一介面
-
卷積運算範例
-
CNN 池化操作範例
-
卷積神經網路(Convolutional Neural Network, CNN)簡介
-
J1939 新世代:基於 CAN FD 的 J1939
-
SAE J1939 深度解析:PGN 與 SPN 拆解
-
SUNCAN CAN FD 實作展示:實際效能評估 Linux
-
CAN FD 協議深入解析
-
為什麼 CAN FD 很重要:超越傳統的CAN
-
Hailo AI 處理器在個人電腦上的應用
-
訪問控制與身份管理
-
智慧交通系統
-
周圍環境防護
-
Hailo AI 處理器應用於AOI 自動光學檢測
-
針對ADAS和AD的Hailo人工智慧處理器
-
你知道CAN-FD協議有多少? by 程式人生
-
STM32-12 CANBus概念介紹 by IT邦幫忙
-
CAN/CAN FD 简介 by 大大通
-
CAN bus 通訊協定介紹 by 大大通
-
CAN总线的升级版-CAN FD简介 by 知乎
-
NXP LPC54018的CAN-FD by 大聯大控股
-
掌握非對稱延遲變數 CAN收發器提高資料傳輸率 by 新通訊 / Magnus-Maria Hell
-
什么是CAN-BUS? by 汽车之家 百科
-
邁向電動車的美好未來 by 電子工程專輯/ 孔敏,莫仕(Molex)中國區汽車事業部高級銷售總監
-
全新車載技術讓中低階車款實現高階音視訊體驗 by 電子工程專輯/STMicroelectronics


