


CAN bus 通訊協定介紹 by 大大通
Can bus 通訊協定介紹
Can bus 概要
- CAN (Controller Area Network)於80年代由Bosch 首先發展,原先是用於汽車上。
- 由兩個國際組織,International Standards Organization (ISO) 和Society of Automotive Engineers (SAE)制定Can bus串列通訊協定標準。
- CAN技術規範目前為版本2.0,此版本分成兩部份:A部份為1.2版的格式,B部份為包括了1.2版的標準message格式,還包括了擴展message格式。
- 目前最快的傳輸速度可達到1Mbit/s 。
CAN BUS 特性及優點(一)
為了建立兼容性及設計的透明度及實施的靈活性,根據ISO/OSI 參考模型,CAN BUS 2.0 B定義規範了Data Link Layer和Physical Layer這兩層,其它網路層則留給系統開發廠商來完成。
CAN BUS 特性及優點(二) 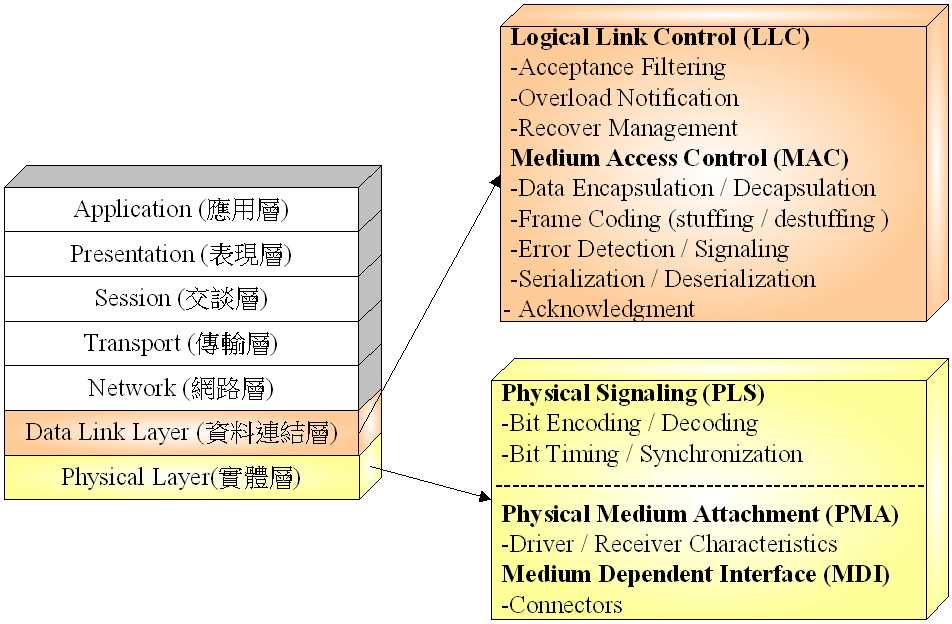 CAN BUS 特性及優點(三)
CAN BUS 特性及優點(三)
使用了如下的通信協定來增加傳輸的效能Carrier Sense Multiple Access and Collision Detection with Collision Resolution (CSMA/CD-CR)
- CS-在每次開始資料的傳送之前,每一個CAN node必需偵測bus上的動作並確定一段期間內無任何信號活動。
- MA-每持續性的一段時間內無信號活動,每一個node都有相同的機會來傳送訊息到CAN bus。
- CD-如果兩個node在同一時間點送出訊息,則衝突會發生,CAN必需能偵測出此衝突的事件。
CAN BUS 特性及優點(四)
CR-使用非破壞式的逐位元仲裁。
a.即使資料碰撞發生,所要發送的Messages仍然保持其完整性。
b.所有仲裁行為發生時都不會對具有最高優先權的資料造成任何延遲或者錯誤。
c.任何因為優先權較低而無法在第一時間傳送的資料封包會自動於下一個可傳送的時間自動的被傳送。
d.要達到上述功能的需求:Dominant 以及recessive位元的狀態必需被事先定義每個node必須不斷的監視bus 上的資料流,比較自己送出的資料與真正出現在bus上的資料是否相符
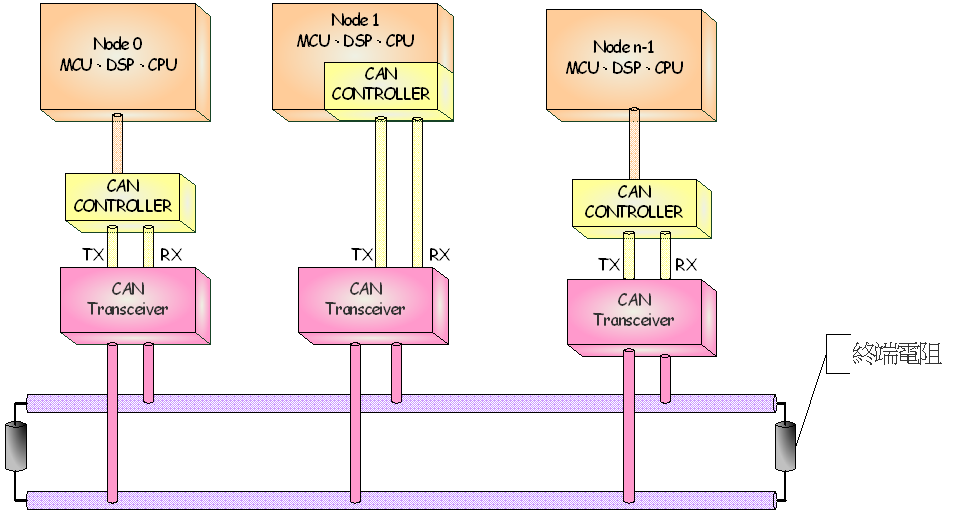
CAN BUS 硬體接法
- CAN CONTROLLER為實現Data Linker Layer。
- CAN Transceiver為實現Physical Layer。
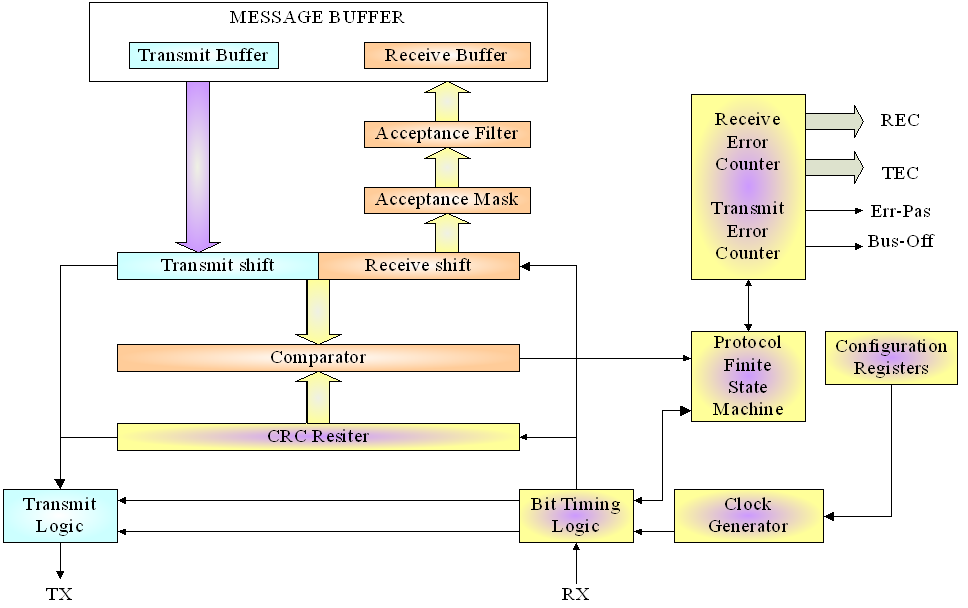
CAN CONTROLLER 方塊圖
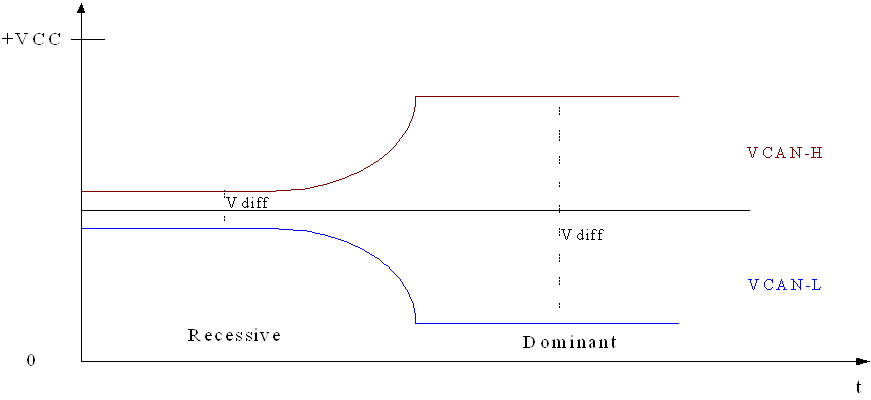
CAN BUS 電氣特性
CAN BUS上Bit “0” 和“1”的表示方法:
vBit “ 0 ”-Vdiff會約大於1V以上(依各廠商的CAN Transceiver特性而定),稱為顯性(Dominant)
vBit “1 ”-Vdiff會驅近於0V左右(依各廠商的CAN Transceiver特性而定),稱為隱性(Recessive)
>出處來源: 大大通
>來源網址:https://www.wpgdadatong.com/tw/blog/detail?BID=B0196
>如有侵權疑慮,請來信告知,立即下架,謝謝

CAN bus 通訊協定介紹 by 大大通
Can bus 通訊協定介紹
Can bus 概要
- CAN (Controller Area Network)於80年代由Bosch 首先發展,原先是用於汽車上。
- 由兩個國際組織,International Standards Organization (ISO) 和Society of Automotive Engineers (SAE)制定Can bus串列通訊協定標準。
- CAN技術規範目前為版本2.0,此版本分成兩部份:A部份為1.2版的格式,B部份為包括了1.2版的標準message格式,還包括了擴展message格式。
- 目前最快的傳輸速度可達到1Mbit/s 。
CAN BUS 特性及優點(一)
為了建立兼容性及設計的透明度及實施的靈活性,根據ISO/OSI 參考模型,CAN BUS 2.0 B定義規範了Data Link Layer和Physical Layer這兩層,其它網路層則留給系統開發廠商來完成。
CAN BUS 特性及優點(二) CAN BUS 特性及優點(三)
使用了如下的通信協定來增加傳輸的效能Carrier Sense Multiple Access and Collision Detection with Collision Resolution (CSMA/CD-CR)
- CS-在每次開始資料的傳送之前,每一個CAN node必需偵測bus上的動作並確定一段期間內無任何信號活動。
- MA-每持續性的一段時間內無信號活動,每一個node都有相同的機會來傳送訊息到CAN bus。
- CD-如果兩個node在同一時間點送出訊息,則衝突會發生,CAN必需能偵測出此衝突的事件。
CAN BUS 特性及優點(四)
CR-使用非破壞式的逐位元仲裁。
a.即使資料碰撞發生,所要發送的Messages仍然保持其完整性。
b.所有仲裁行為發生時都不會對具有最高優先權的資料造成任何延遲或者錯誤。
c.任何因為優先權較低而無法在第一時間傳送的資料封包會自動於下一個可傳送的時間自動的被傳送。
d.要達到上述功能的需求:Dominant 以及recessive位元的狀態必需被事先定義每個node必須不斷的監視bus 上的資料流,比較自己送出的資料與真正出現在bus上的資料是否相符
CAN BUS 硬體接法
- CAN CONTROLLER為實現Data Linker Layer。
- CAN Transceiver為實現Physical Layer。
CAN CONTROLLER 方塊圖
CAN BUS 電氣特性
CAN BUS上Bit “0” 和“1”的表示方法:
vBit “ 0 ”-Vdiff會約大於1V以上(依各廠商的CAN Transceiver特性而定),稱為顯性(Dominant)
vBit “1 ”-Vdiff會驅近於0V左右(依各廠商的CAN Transceiver特性而定),稱為隱性(Recessive)
>出處來源: 大大通
>來源網址:https://www.wpgdadatong.com/tw/blog/detail?BID=B0196
>如有侵權疑慮,請來信告知,立即下架,謝謝
CAN bus 通訊協定介紹 by 大大通
Can bus 通訊協定介紹
Can bus 概要
- CAN (Controller Area Network)於80年代由Bosch 首先發展,原先是用於汽車上。
- 由兩個國際組織,International Standards Organization (ISO) 和Society of Automotive Engineers (SAE)制定Can bus串列通訊協定標準。
- CAN技術規範目前為版本2.0,此版本分成兩部份:A部份為1.2版的格式,B部份為包括了1.2版的標準message格式,還包括了擴展message格式。
- 目前最快的傳輸速度可達到1Mbit/s 。
CAN BUS 特性及優點(一)
為了建立兼容性及設計的透明度及實施的靈活性,根據ISO/OSI 參考模型,CAN BUS 2.0 B定義規範了Data Link Layer和Physical Layer這兩層,其它網路層則留給系統開發廠商來完成。
CAN BUS 特性及優點(二) CAN BUS 特性及優點(三)
使用了如下的通信協定來增加傳輸的效能Carrier Sense Multiple Access and Collision Detection with Collision Resolution (CSMA/CD-CR)
- CS-在每次開始資料的傳送之前,每一個CAN node必需偵測bus上的動作並確定一段期間內無任何信號活動。
- MA-每持續性的一段時間內無信號活動,每一個node都有相同的機會來傳送訊息到CAN bus。
- CD-如果兩個node在同一時間點送出訊息,則衝突會發生,CAN必需能偵測出此衝突的事件。
CAN BUS 特性及優點(四)
CR-使用非破壞式的逐位元仲裁。
a.即使資料碰撞發生,所要發送的Messages仍然保持其完整性。
b.所有仲裁行為發生時都不會對具有最高優先權的資料造成任何延遲或者錯誤。
c.任何因為優先權較低而無法在第一時間傳送的資料封包會自動於下一個可傳送的時間自動的被傳送。
d.要達到上述功能的需求:Dominant 以及recessive位元的狀態必需被事先定義每個node必須不斷的監視bus 上的資料流,比較自己送出的資料與真正出現在bus上的資料是否相符
CAN BUS 硬體接法
- CAN CONTROLLER為實現Data Linker Layer。
- CAN Transceiver為實現Physical Layer。
CAN CONTROLLER 方塊圖
CAN BUS 電氣特性
CAN BUS上Bit “0” 和“1”的表示方法:
vBit “ 0 ”-Vdiff會約大於1V以上(依各廠商的CAN Transceiver特性而定),稱為顯性(Dominant)
vBit “1 ”-Vdiff會驅近於0V左右(依各廠商的CAN Transceiver特性而定),稱為隱性(Recessive)
>出處來源: 大大通
>來源網址:https://www.wpgdadatong.com/tw/blog/detail?BID=B0196
>如有侵權疑慮,請來信告知,立即下架,謝謝
CAN bus 通訊協定介紹 by 大大通
Can bus 通訊協定介紹
Can bus 概要
- CAN (Controller Area Network)於80年代由Bosch 首先發展,原先是用於汽車上。
- 由兩個國際組織,International Standards Organization (ISO) 和Society of Automotive Engineers (SAE)制定Can bus串列通訊協定標準。
- CAN技術規範目前為版本2.0,此版本分成兩部份:A部份為1.2版的格式,B部份為包括了1.2版的標準message格式,還包括了擴展message格式。
- 目前最快的傳輸速度可達到1Mbit/s 。
CAN BUS 特性及優點(一)
為了建立兼容性及設計的透明度及實施的靈活性,根據ISO/OSI 參考模型,CAN BUS 2.0 B定義規範了Data Link Layer和Physical Layer這兩層,其它網路層則留給系統開發廠商來完成。
CAN BUS 特性及優點(二) CAN BUS 特性及優點(三)
使用了如下的通信協定來增加傳輸的效能Carrier Sense Multiple Access and Collision Detection with Collision Resolution (CSMA/CD-CR)
- CS-在每次開始資料的傳送之前,每一個CAN node必需偵測bus上的動作並確定一段期間內無任何信號活動。
- MA-每持續性的一段時間內無信號活動,每一個node都有相同的機會來傳送訊息到CAN bus。
- CD-如果兩個node在同一時間點送出訊息,則衝突會發生,CAN必需能偵測出此衝突的事件。
CAN BUS 特性及優點(四)
CR-使用非破壞式的逐位元仲裁。
a.即使資料碰撞發生,所要發送的Messages仍然保持其完整性。
b.所有仲裁行為發生時都不會對具有最高優先權的資料造成任何延遲或者錯誤。
c.任何因為優先權較低而無法在第一時間傳送的資料封包會自動於下一個可傳送的時間自動的被傳送。
d.要達到上述功能的需求:Dominant 以及recessive位元的狀態必需被事先定義每個node必須不斷的監視bus 上的資料流,比較自己送出的資料與真正出現在bus上的資料是否相符
CAN BUS 硬體接法
- CAN CONTROLLER為實現Data Linker Layer。
- CAN Transceiver為實現Physical Layer。
CAN CONTROLLER 方塊圖
CAN BUS 電氣特性
CAN BUS上Bit “0” 和“1”的表示方法:
vBit “ 0 ”-Vdiff會約大於1V以上(依各廠商的CAN Transceiver特性而定),稱為顯性(Dominant)
vBit “1 ”-Vdiff會驅近於0V左右(依各廠商的CAN Transceiver特性而定),稱為隱性(Recessive)
>出處來源: 大大通
>來源網址:https://www.wpgdadatong.com/tw/blog/detail?BID=B0196
>如有侵權疑慮,請來信告知,立即下架,謝謝


